

年前,GCP硅谷专家咨询邀请了三星北美研发中心高级经理王凡博士,从自身专业角度解读了在自动驾驶中智能感知技术的三大因素以及车联网V2X技术。
王凡博士,亚利桑那大学硕士和博士毕业,三星北美研发中心高级经理,负责自动驾驶中的人工智能感知、路径规划和决策方向,同时负责战略部门投资收购的咨询建议。以下为嘉宾观点分享:
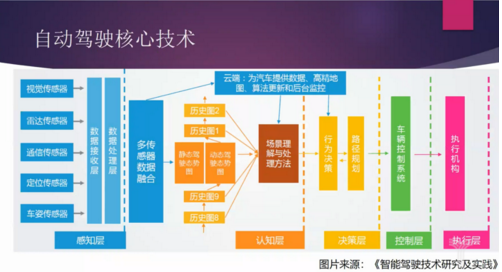
无人驾驶的核心技术有五个主要模块:传感器、定位、AI感知、路径规划和决策、车辆控制。传感器包括视觉、雷达、通信、定位等不同类型,将信息传递给智能感知模块,检测车辆所处的环境。根据以上的感知结果,汽车决定最优的路径和决策,最后到达车辆控制和执行,完成整个流程。此外定位是指车辆通过GPS或者是SLAM的方式确认自己在地图的位置。
今天主要讲的是人工智能感知,不过在此之前可以大概提一下行业内发展比较大的方向,比如从传感器角度来说,Velodyne的激光雷达市场占有率和利润率都很高,成本都是在几万美元,接近整车价格,所以硅谷有很多创业者计划把激光雷达的成本降到1000美元以下,实现类似性能。定位方面,我们知道最好的是RTK(载波相位差分技术)这样的实时定位系统,但这个价格是比较贵的,比如市场常用的SBG定位传感器大概有3万美元,相对于整车而言成本很高。硅谷同样有公司以十分之一的价格实现类似的功能。所以在传感器方面有很多公司在做不同的研究。
自动驾驶中的人工智能感知技术
在汽车上应用人工智能感知的目的,就是为了让计算机具备对周围车辆/行人的距离、速度、朝向,交通标识等所有环境信息的获取和认知能力,进而进行合理的规划和决策。之所以自动驾驶在近两年有比较大的突破,感知技术发挥了至关重要的作用,其中深度学习的图片识别能力甚至达到人眼的水平。这些更精确的算法成为自动驾驶商业化的前提。
主要有三个因素促进了人工智能感知技术的发展:有标注的结构化数据、深度学习算法以及计算力/计算平台。
在训练数据方面,目前已经有ImageNet、Kitti、Cityscapes等公开数据集,很多的初创公司都在用公有数据集进行一些初始模型的开发。但这些数据集并不是很适合于自动驾驶的需要,欠缺汽车行进过程中的环境因素。所以很多大的公司都在采集汽车驾驶的视频影像,构建自己的私有训练数据。私有数据标注主要有公司内部标注和外包标注两种做法,根据公司自身的人力资源情况进行选择。目前较大的外包数据标注公司有数据堂,和采取众包形式的CrowdFlower。随着深度学习运用越来越频繁,数据标注公司前景还是比较广阔的。
其次是深度学习算法。业界在做自动驾驶的时候很多是从计算机视觉来入手的,而计算机视觉包括了以CNN(卷积神经网络)为核心的各种模型,比如YoLov2、SDD、Faster R-CNN、Mask R-CNN。这些算法有各自的优势,但是仅能在PC端发挥较佳的效果,在汽车行进并需要高速运算的过程中,这些算法的效率可能会打很大折扣。这就需要对模型进行优化。国内的代表性公司有商汤科技和格灵深瞳,硅谷也有很多类似的公司。
第三个是计算平台。目前有三个比较大的趋势。大部分在用的NVIDIA的GPU,比如DRIVE PX、Xavier等计算力很强的平台,不过它们的功耗也很高。Google则针对人工智能框架TensorFlow发布了TPU计算平台,但目前该平台主要还是对内状态。此外就是其他专用于深度学习的芯片,在车辆的环境中以较小的模块实现更强的感知计算功能。国内在这方面做的最大的两家是地平线和寒武纪。
车联网V2X
以上讲的是比较传统的单车人工智能方式,即传感器——人工智能的感知识别——路径规划和决策——控制的线路。此外常提的就是车联网(Vehicles to Everything,车与一切物体的信息交换)。之所以车联网会比较火热,主要原因是:单车的人工智能感知容易受限制,需要有极高的成功率才能上路驾驶,此前特斯拉的autopilot系统就因识别错误出了两次车祸,而V2X是提高感知成功率的发展方向。比如,单车智能下的汽车无法看到走在前方车辆正前方的行人,通过V2X技术,前车就能够把感知到的信息传递给后车。还有红绿灯检测,在夜晚,自动驾驶有可能会误把前方车辆的刹车灯看作红灯导致行车事故,一旦车与道路设施信号实时通信,则避免了这个麻烦。
总结而言,车联网主要包括以下几个需求:车与后台服务器互联,包括更新高清地图、车载系统升级等;车与道路设施直接互联,比如红绿灯、事故预警;车与车互联。目前,我国官方在智能网联汽车的相关文件中已经对车联网发展等级做了以下划分,而欧美国家对此尚无清晰的定义,可见中国在车联网领域是走在前面的。
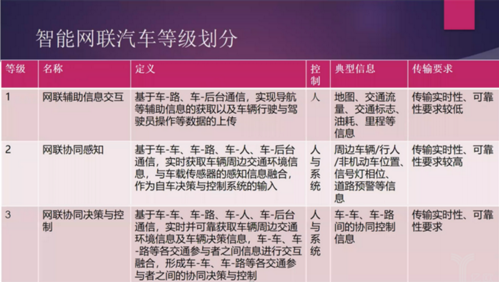
目前,传输实时性、可靠性要求较低的“网联辅助信息交互”技术已经实现,而网联协同感知技术仍处于研究过程,最高级别为网联协同决策与控制技术。嘉宾认为,当道路上有更多的自动驾驶汽车时,车与车将在更大的交通协同下更合理地驾驶运作,但这对通信技术要求极高,落地时间会比较远。
国际上有两条车联网技术路线:DSRC和Cellular V2X(LTE-V或5G)。前者即专用短程无线通信技术,可以实现在特定小区域内对高速运动下的移动目标的识别和双向通信,可实时传输图像、语音和数据信息,该技术目前发展已相对成熟并开始应用,具有低延时、可靠性的特点。有不少公司已将DSRC作为自己的产品并开始使用,自动驾驶卡车车队就是一个很好的案例(一名司机驾车领队,后车自动驾驶跟随)。
第二类是基于4.5G的无线通信行业标准推出,以LTE蜂窝网络作为基础,面向未来5G,是车联网的专有协议。就像手机一样,它有更广的通信距离,有更大的系统容量(一个基站可以支持上百辆车的通信需求),有成本优势,有可靠性、低延时的特点。该技术起步较晚,但起点很高,目前该类市场还不是很拥挤。
Q&A环节
Q:在感知方面最大的难点是什么?A:难点有很多,嘉宾认为最大难点在特殊情况(罕见场景)下感知能否发挥感知能力,我们目前的训练数据能基本涵盖常见的路况,但汽车遇到罕见的路况时还能否成果检测出来,特斯拉的事故就跟此有关。目前感知成功率已经很高,但最后1%的问题尚有待解决。
Q:有什么方式在可预见的几年能很好地解决?
A:在真实场景下有些情况我们很难遇到,但在仿真环境下则能够构建,改进算法。
Q:车联网在无人驾驶中的重要性?
A:现在我们还在无人驾驶的起步阶段,大家在做的是如何推出一辆这样的汽车,但在未来无人车变多的时候就需要考虑如何让整个汽车交通更加安全,车联网在解决这个问题占很重要的位置。
Q:车联网目前有什么难点和机遇?
A:DSRC技术目前发展已比较成熟,Cellular V2X起步较晚,5G标准尚未确定,但大有可为。
Q:三星在无人车的哪个领域布局?
A:在今年的CES展,三星公司第一次公开无人驾驶的软硬件集成平台DRVLINE,面向车厂。相比于同类产品,DRVLINE具有开放性和模块性,其他公司可以把自己的算法嵌入平台。三星在无人驾驶的投入很高,此前花了80亿美元收购哈曼电子,打入Tier1市场,还有很多的战略合作和投资合作。



