

自动驾驶汽车依然面临一个尴尬的问题:
号称自动驾驶,这些汽车到底什么时候不用人类驾驶?
这个问题的最终解释权在道路交通管理部门。
放下各种法律法规不谈,汽车和科技巨头们在技术端依然没能实现全自动驾驶。
因此,除了在公路上持续测试,自动驾驶公司还求助于模拟,试图在虚拟环境中试遍各种情况,将现实世界中不常出现的变量也一一化解。
通常来说,我们通过考试,就能拿到驾照通行全国。但换到自动驾驶汽车上,这一套就行不通了。
这些车辆的获得相关能力时需要「因城施策」,而且必须进行更为详尽的场景测试,甚至精确到某个十字路口。
为了进入这个价值 7 万亿美元的超级市场,业内各家公司在测试上卯足力气,以便赢得公众和监管者的信任,而模拟测试显然是他们证明自己的最佳展示平台。
汽车之心(微信 ID:Auto-bit)以模拟为切入点,整理总结了来自包括汽车厂商、科技巨头、新创企业在内的公司专家的观点。
这些业内顶级的专家正花费巨额资金回答一个问题,即我们到底该测试些什么?
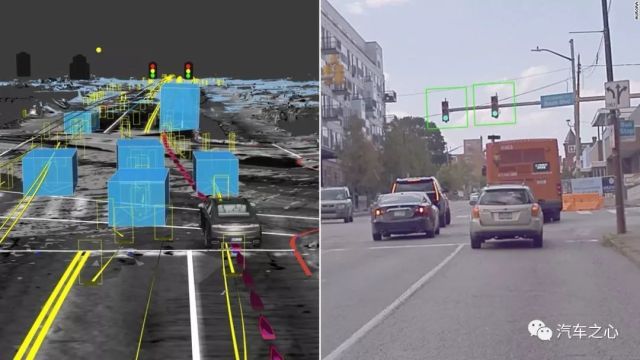
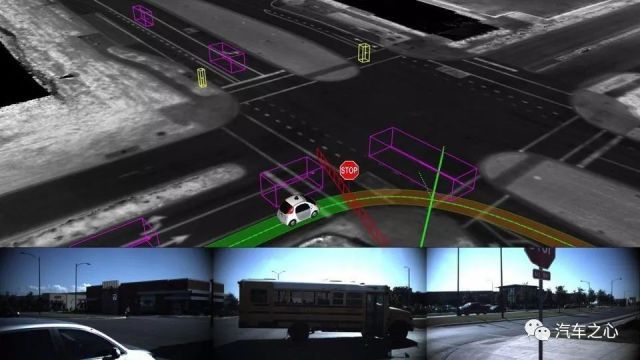
图 1:模拟与现实中的十字路口
1、没有模拟,就没有自动驾驶汽车
拿通用自动驾驶团队 Cruise 来说,Cruise 的虚拟测试车每天要在模拟器中运行 20 万个小时。
至于公认的行业领头羊 Waymo,在模拟器里已经累积了超过 100 亿英里的测试里程。
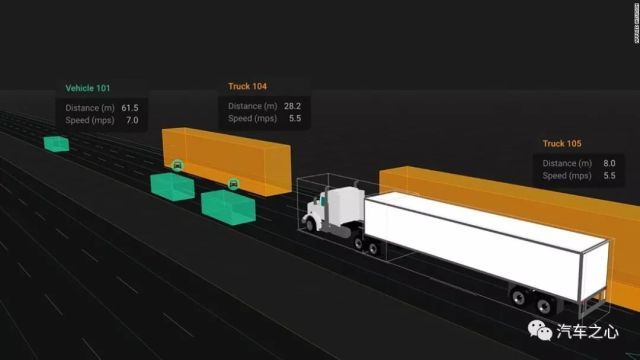
自动驾驶汽车在模拟场景中训练图片来自51VR自动驾驶仿真平台
对自动驾驶公司来说,尤其是训练神经网络时,模拟器的重要性越来越强了。
为什么放着现实世界的数据不用而求助于模拟?原因有三:
1. 在现实世界采集数据是有危险的;
实车测试无法满足自动驾驶的测试里程要求和场景覆盖度要求。模拟是保障自动驾驶汽车安全不可或缺的测试手段。
行业内专家学者认为,验证自动驾驶汽车的安全性需经过上亿公里的测试里程积累,如兰德公司认为自动驾驶需要几亿公里的里程测试数据来确保安全性,宝马认为自动驾驶研发至少需要达到 2.5 亿公里的测试。
2. 许多假设和反事实情况在现实中是无法企及的;
与实车测试相比,仿真模拟测试可以在短时间内对罕见案例进行多次复现,加速自动驾驶汽车的生产周期,节约研发成本,积累测试里程。
3. 采集更为丰富数据的要求。
这是因为现实世界中数据采集的速度有限。
可以这么说,现在没有哪家自动驾驶公司不用模拟器。
对测试软件来说,模拟器是绝对的杀手级工具,在某些情况下它还能训练神经网络。
自动驾驶技术不过关,后果可能是车毁人亡
那么,这些公司是如何利用自动驾驶模拟测试反哺到真实的场景中去的?
与 Waymo 类似,Zoox 也有「无保护左转困难」的烦恼。
于是,Zoox 团队开发了一个人工左转信号灯,然后灌入模拟环境。
Zoox 联合创始人 Jesse Levinson 透露称,不久之后 Zoox 的自动驾驶系统识别起现实世界的左转信号灯就顺畅多了。
今年早些时候,Lyft 注意到自己的测试车一旦被其他车加塞,就会急刹车。
于是,Lyft 的工程师将这一场景放入模拟器。据 Lyft 自动驾驶负责人 Luc Vincent 介绍,这样的方法不但速度快,成本低,自动驾驶系统「一惊一乍」的毛病也得到了改善。
Aurora 也非常依赖模拟,通过记录人类驾驶员的驾驶习惯,然后在模拟器中与自动驾驶系统进行对比。
Aurora 联合创始人 Sterling Anderson 说,在路测前会专门提醒司机,必须像专业司机那样去驾驶。
与其他公司一样,特斯拉也不敢轻视模拟器。特斯拉 CEO Elon Musk 表示,「世界太复杂,说不清什么时候就会有极端情况登门造访。」
好消息是,模拟器里场景几乎是无限的。但大多数公司并不愿透露自己到底测试了多少场景。
安波福是个特例,据汽车之心了解,安波福已经在模拟器中构建了超过 4 万个场景。
有行业人士表示,想要实现 100% 的完美是不可能的。但在让自动驾驶系统更安全的过程中,我们得保证一切安全可靠。
模拟也有短板
既然自动驾驶模拟测试可以反哺到真实场景中去,那么模拟能替代现实世界中大规模的数据采集工作吗?
答案是:不能。
原因在于,模拟无法拥有与现实世界相同的经验知识,而其中一些经验知识对驾驶来说又必不可少。
举例来说,模拟器中没有其他道路参与者如:车辆、行人与自行车等行为习惯的经验知识。
这个问题可以分为两部分:
行为预测:在道路参与者做出下一步动作前预知他们的行为。
沟通与互动:了解道路参与者对自动驾驶汽车的行为会作何反应,同时知晓该如何做出相应反应,以实现双赢的结果。
人类的行为表现是一个经验问题,需要经验数据来解答。
也就是说,类似游戏中那样简单化的人类行为模型,对付一些有限的驾驶环境还行,但随着场景变得更密集,城市拥挤、混乱、复杂、交互等一系列条件叠加时,为人类行为建模的难度会几何级增长,简化模型的预测能力也会直线下降。
而自动驾驶汽车需要精确的经验现象模型。
举例来说,如果一辆自动驾驶汽车在路口左转,面对迎面驶来的车辆,它必须判断到底对方会不会减速?减多少速?
这类知识从纸上谈兵般的分析中得不出来,这完全是经验。
这也是为什么驭势科技的一位工程师向汽车之心解释:模拟的技术难点之一在于「真」。如果做得不够逼真、不够贴近现实,那么依托于模拟之上的自动驾驶系统开发也会变得失真,最终无法应用于现实世界。
作为「不差数据」的头部公司,Waymo 选择用手上积累的测试数据训练人工智能系统,以更好地模仿真实司机与行人。
在模拟测试中,Waymo 甚至会测试模拟的人类驾驶员与行人是否会撞向对方,以此来判断模拟的场景是否足够真实。
Waymo 首席科学家 Drago Anguelov 解释,这个领域其实才刚刚萌芽。如果你见的模拟器多了,就会发现它们中许多模拟出的世界并不真实,因而会影响测试效果。
就拿 Uber 来说,最近 Uber 在测试停着的车后站人的场景,结果显示模拟器中的车根本不会像现实中一样减速。
工程师对模拟器精度进行校准时发现,原来车辆只注意到了前方交通信号灯的颜色。绿灯亮起,车辆自然会加速行驶。
Uber 赶紧对这一问题进行了调整,以保证车辆表现得像现实世界中一样(靠近红绿灯才开始识别)。
采集现实世界的数据
训练行为预测的数据可以被动地从现实世界中采集,只要车辆配好摄像头、计算机和互联网就行。此后,观察、预测、标记错误并上传等就可以完成。
训练沟通与互动的数据也能被动采集,只要我们记录下驾驶员驾驶时的输入,如转向、加速、刹车和灯光信号等。
在业内,我们称之为模仿学习。
人类驾驶员会手把手向神经网络展示如何与现实世界的道路参与者进行沟通与互动,而神经网络只需要在情境变量相同时执行此前学到的动作即可。
从理论上来讲,这些有用的数据我们也可主动进行采集。
例如,自动驾驶汽车或驾驶员辅助系统做出某一判断后,如果人类驾驶员给予否定(接管方向盘),那么这次纠正就会成为模仿学习的重要材料。
当然,如果换到强化学习的语境下,系统就能在不断减少人类干预的情况下等到奖励。
如果哪家自动驾驶公司能让神经网络精确模仿人类驾驶员的行为,在模拟时就能精确很多。
完成这一步后,他们就能利用模拟的方法训练神经网络如何进行驾驶强化学习模式。
不过想要实现这一目标,还是得先从现实世界采集海量数据。
模拟器里并没有驾驶的真知灼见
想学会驾驶,自动驾驶汽车需要准确预测其他道路参与者的一举一动,同时还能与他们进行沟通和互动,特别是其他车上的人类驾驶员。
想做好预测工作,就得从经验出发观察其他道路参与者,而成功的沟通与互动则需要对其他道路参与者的一举一动了如指掌,这同样需要经验。
所以说,模拟器里并没有驾驶的真知灼见,除非它是由经验数据训练出来的神经网络。
想向模仿学习与强化学习借力,自动驾驶汽车可能得在路上行驶上百年,因为系统对经验的需求量实在太过庞大,一个几百辆车的测试车队只能算杯水车薪。
当然,即使自动驾驶公司手上有数百万辆新车,也不一定能完美实现全自动驾驶,但它们带来的数据肯定可靠性要强得多。
来源:汽车之心



