

泊车辅助PA(Parking Assist)是针对泊车场景下的ADAS功能,与道路驾驶场景下的ADAS功能(ACC、LKA、TJA、HWA等)相对独立,尤其在传感器配置上为两套体系。
泊车辅助功能具体可分为以下4类:

在目前自主品牌的在售车型中,WEY和领克均配置有半自动泊车辅助Semi-APA,长安和荣威配置有全自动泊车辅助F-APA。根据目前的发展速度,相信在未来的2~3年内,semi-APA将会被F-APA完全取代,本系列将主要介绍F-APA相关内容。
一、 F-APA的功能
全自动泊车辅助系统(F-APA)通过传感器搜索车辆周边环境,寻找其它停放车辆之间适当停车位或地面车位标记(如车位线等),并根据驾驶员的选择自动或手动确定目标车位,计算自动泊车轨迹,并发送横向及纵向运动控制命令,引导车辆停放在目标泊车位置,并达到一定的位置精度要求。
F-APA主要功能简述见表13.6-1。

二、 F-APA的分类
根据传感器配置的差异,F-APA可分为两大类,即:基于超声波雷达的F-APA和基于全景影像与超声波雷达融合的F-APA,其中基于全景影像与超声波雷达融合的方案可认为是F-APA的终极解决方案,已成为目前的市场主流。
两种类型的F-APA的对比如下表2。

由上表可以看出,传感器增加了360全景摄像头后,F-APA的车位识别能力大大提升,可通过摄像头直接识别到超声波雷达无法识别的由车位线组成的车位和超声波雷达不易识别的倾斜车位。
且在HMI设计上,F-APA可与360全景影像AVM进行融合,提升用户体验质量的同时,还允许用户在AVM界面上直接选择系统无法自动识别的区域为目标车位,进行自动泊车。
本系列将以全景影像与超声波雷达融合的方案为主,介绍F-APA。
三、 F-APA的硬件架构
F-APA典型硬件架构见图2,整个系统主要包括1个控制器、4个高清摄像头、12个超声波雷达、HMI装置(控制开关、ICM、IHU等)及执行器(EPS、ESC、TCU、EPB等)。

1) 传感器
在早期的F-APA系统中,多仅采用超声波雷达作为外部环境感知传感器,但受限于超声波雷达本身的感知能力,此类系统仅能识别由边界车、路缘确定的车位,而无法识别由车位线确定的车位。现多采用超声波雷达和摄像头的数据融合方案,弥补了单一超声波雷达对于车位线识别能力的不足。
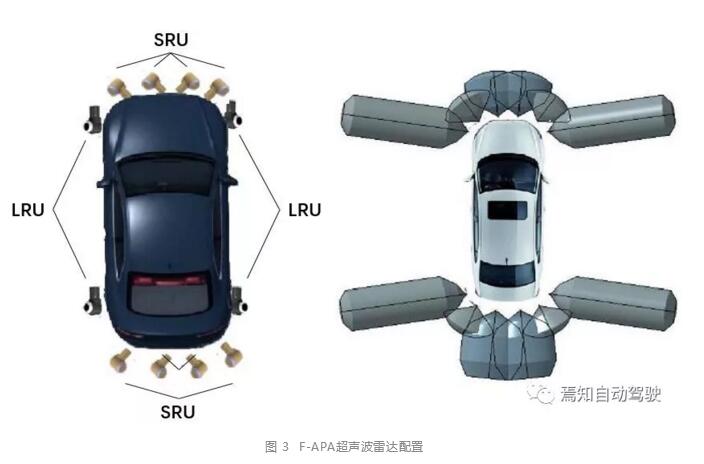
F-APA通常需要12个超声波雷达,其中4个为长距离超声波雷达(LRU),用于探测车身两侧的障碍物距离;8个为短距离超声波雷达(SRU),用于探测车前和车后的障碍物距离。具体见图3。
F-APA采用的摄像头为4个与360全景影像AVM共用的高清鱼眼摄像头,分别布置在车辆前格栅、后保/后背门及左右后视镜四处。
2) 控制器
对于超声波雷达和摄像头融合方案的F-APA,其一般与360全景影像AVM共用同一个控制器,具体控制器硬件架构可参见下图4。

3) 执行器
F-APA需同时控制车辆进行横向运动及纵向运动,其所需要的执行器较多,主要包括EPS、ESP、EMS、TCU、EPB、VCU等。



