

2018年10月,图像级激光雷达系统开发商Innovusion宣布获得由蔚来资本、斯道资本,和F-Prime Capital领投约3000万美元的A轮融资。
2018年11月,Innovusion的激光雷达系统Innovusion Cheetah(猎豹)也正式面向全球客户开放订购。作为全球首款图像级激光雷达系统,猎豹支持L3级及以上(特定运行条件下全自动)自动驾驶解决方案。具体而言,该产品能够探测200米以外的物体,并生成高密度点云(300 线)。
2019年1月,Innovusion成立中国子公司图达通智能科技(苏州)有限公司。
2019第四届ADAS与自动驾驶论坛于3月21-22日在上海召开,论坛由CCIA智能网联专委会与佐思产研主办,地平线、纵目科技、中科慧眼、中电昆辰、富兰光学、创景科技等单位支持。
Innovusion 创始人兼CEO鲍君威在论坛上发表了题为“图像级激光雷达构建自动驾驶的可靠感知系统”的演讲。以下是演讲全文。

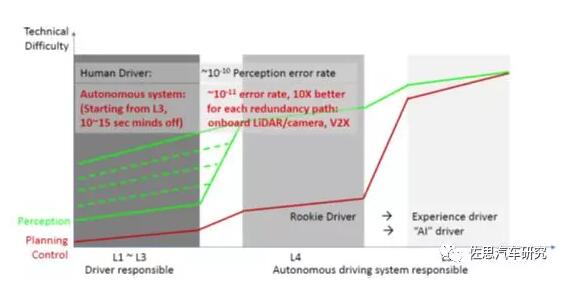
先介绍一下L1到L5自动驾驶分类和对感知控制的要求。在L4以下的场景对控制要求不是很高,但对L5是一个跳跃,要处理各种复杂场景。对于感知,从L3开始因为有至少十几秒的驾驶员不专心开车的时间,就需要驾驶系统能够完全可靠地取代人的感知。根据统计数据,人类感知系统一百万小时左右会有1起死亡事故,感知误差率是十的负十次方以下。如果切换到自动驾驶系统,需要比人类的感知好十倍以上,至少达到是的负十一次方,这样的误差率还需要冗余,各个传感器比如摄像头,激光雷达,毫米波雷达都需要撑起自己达到这样可靠感知的重任。
来看两个比较典型的场景。第一是城镇道路低速行驶的场景,能有效感知到50米以内范围的大人、小孩、各种障碍物等。这里小孩作为一个代表,激光雷达本身的原理非常简单,像激光笔一样打到边上屏幕上,发过去再回来。但是自动驾驶难就难在要在自然的场景下,在自然光的条件下,有时候还有阳光,各种雨雾天气情况下打这个激光笔的光点,而且光电会打到各种不同特性的物体表面。如果打在会场后面,大家可以看到光点大很多了。如果在外面阳光下,用这个激光笔打的光点几乎是看不到的。在自然环境下保守估计有5%-10%的几率激光雷达系统会接收不到从物体返回的信号。
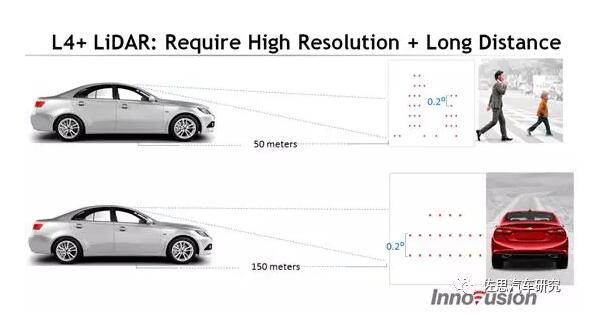
比如在50米以外,一米高的小孩要十个点以上(才能有效感知),需要激光雷达的传感器分辨率至少达到0.2度左右。另外高速路上的行驶,大家公认比较保守的停车、刹车距离大约是150米左右,这么远距离以外,汽车比人更不可控制,也许有一些车本身擦得很亮,颜色非常深,这时候一个车上需要有15-20个点左右。同样推算,激光雷达的分辨率也需要0.2度左右。一个驾驶场景考虑到纵向有坡度等不同变化条件下,大家可能希望有大约20-30度左右的视角。30除以0.2度,所以大家希望激光雷达达到的线数是150线左右,这是L4级自动驾驶的最低线数。
L3级呢?如果希望感知系统能够更可靠的辅助人类驾驶员,达到安全状态的话,它的要求也是很高的。如果对于驾驶员要求特别敏感,可以将LIDAR的要求放得特别低,所以这有很大的变化范围。
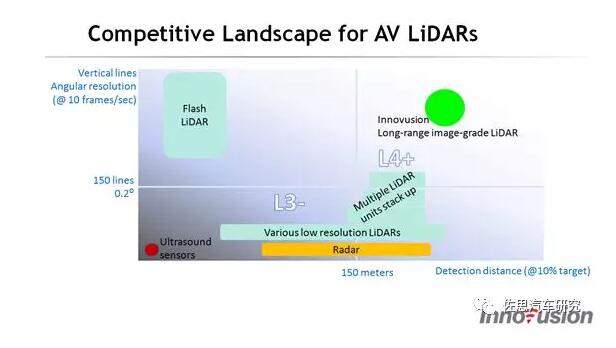
现在传感器是在什么状态呢?比较关键的超声传感器是几米的测量距离。毫米波雷达做得好的,长距离可以达到一两百米,甚至更远,近距离几十米,但线数是非常低的。目前市场上出现了很多低线的激光雷达,譬如8,、16、32、64线的,最近出来128线的,在这个范围内还是和毫米波雷达一样,做得好的能达到250米,做得不好的三四十米,但是都达不到L4级自动驾驶的要求。 还有的激光雷达像相机一样,分辨率非常高,达到百万像素,但是测量距离非常近。
如果大家想达到L4级该怎么办呢?堆叠多个激光雷达,达到及格线,大约0.2度,或者150线。Innovusion希望用一枚激光雷达可以达到300线,而且可以达到两百米以上的测定距离。核心就是们希望用激光雷达提供一个可以信赖的眼睛,具有高分辨率和长距离特征。
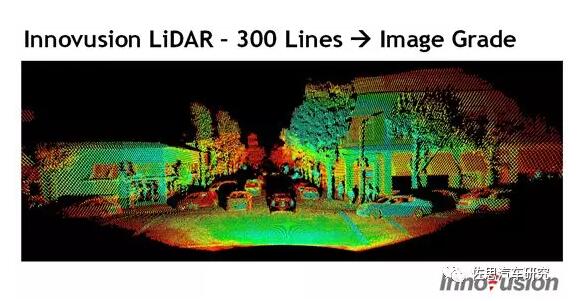
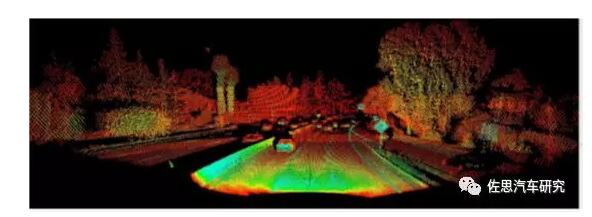
下图是Innovusion激光雷达的点云。看过了低分配的激光雷达,大家觉得激光雷达就是一条一条的,中间很多漏洞。下图可以看出分辨率可能不如高清视频高,但也达到了300线,相当于二三十年以前老电视的分辨率了。如果看仔细些,几乎各个车辆可以看清楚,行人、建筑物也知道是在什么地方。
(视频播放)这是速度快的场景,限速80公里,所以车、车道线、两边的分割线、电线在80-100米可以显示出来,由此体现出激光雷达超高的分辨率。可以看到车道线的分割线可以远到100米左右,路面上的点大约70米左右。每个点都是实时产生的,精确到几厘米的点。
再来看测得比较远的距离,下图图像距离大约是280米,很多车在200米以内可以很好探测到。大家看到这三辆车,离了这么远的距离,车本身的形状已经不能特别清楚得显示出来,每车车尾可以看到六七个到十个点左右,三辆车分别在277米、246米、225米距离处。
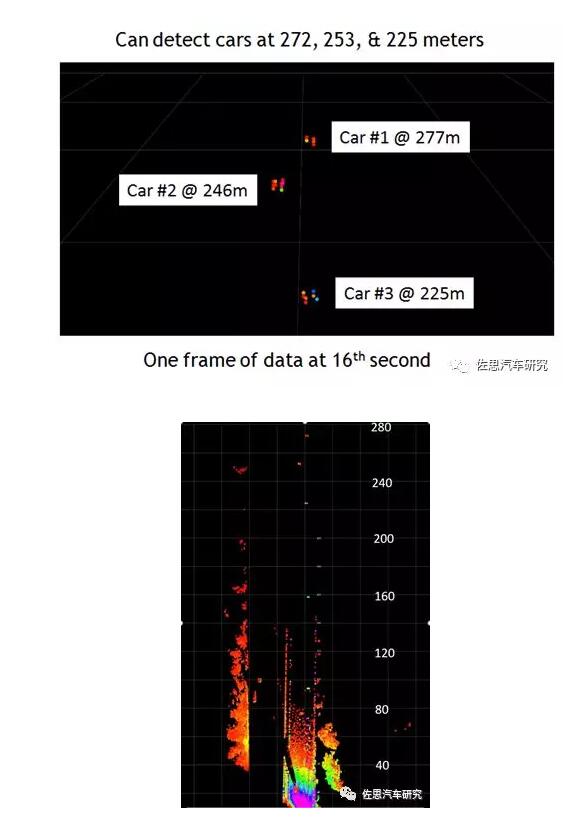
自动驾驶的要求不能因为看到一个点、两个点就认为是物体了。Innovusion的LIDAR可以看到250米以外车尾的七八个点,就让系统有足够的时间做规划控制,即使是对重卡来说,开到100公里的速度也是可以控制的。
下面是典型的感知系统演示1.0、2.0版本。2.0让大家把数据拿过来做训练感知,由于激光雷达探测距离、密度局限,最多探测50米以内的物体,50-100米之外,可能能做一些事情,但是点云密度不大。
下一步是感知系统评测的3.0版本。自动驾驶不能挑场景,只探测比较大的物体。开车的时候需要看什么呢?希望看到任何一个在路上的,可能对车辆、轮胎产生危险的物体,典型物体是什么呢?比如一块砖,20厘米高。激光雷达多少米可以看清这个物体呢?人一般是50-100米看清。激光雷达能不能看清?
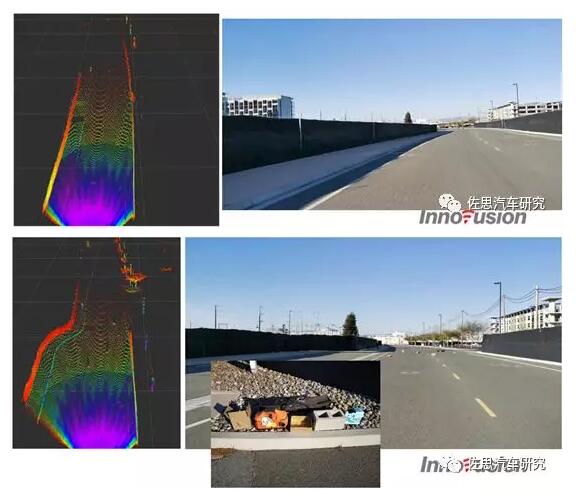
这里模拟了一个场景(视频播放),在一个路上开车,100-120米之间有物体出现了,这是放的障碍物,慢慢离得越来越近,基本大小20厘米高。探测点在100米以外基本是三到四个点以上。这不是常见的场景,但是一定要确认不能出事,不能到30米才探测到。
如果激光雷达可以探测到100-120米之间的障碍物,对高速行驶的车就是一个很好的保护。Innovusion希望把目前的要求定义在100到120米之间,想象一下在高速公路上,汽车时速120公里左右,在100-120米左右看到三四个点,通过这样的算法,可以积累三到五帧的数据。此时车可以减速,无需急刹车,等大约六七十米左右可以判断是不是对行驶产生危险的物体。速度相对比较慢时,如果真遇到这样的场景,即可急刹车。
那么在这个场景中,100-120米之间看到的障碍物是什么样呢?这个橘黄色像电池一样的东西高20厘米, 这个砖宽40厘米,桔红色的盒子也是同样大小。80-120米之间的人,对比摄像头的影像,汽车可以判断出来,人在比较远的地方可以看得非常清楚。这种复杂场景下,大家看到的是图像级的三维实时场景。
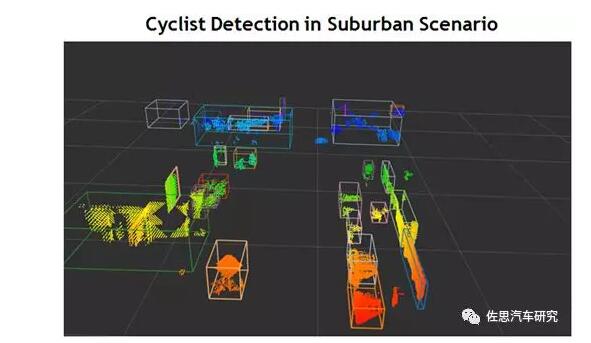
在场景复杂、繁忙的停车场、交通路口,大家不能完全探测到场景里面所有的物体,好多传感器比如激光雷达密度不够,普通摄像头探测可靠性不足,并且需要大量计算资源。我们这里把激光雷达架在车上,看看监控复杂场景的情况。大家可以看到120米范围内的行人、车辆、甚至骑车的小孩儿都可以清清楚楚地从高密度三维点云图探测到,并有足够时间跟踪及使用AI系统做行为预测。 如果把高清激光雷达挂在路边作为V2X车路协同的传感器,会给整个自动驾驶系统提供可靠的另一路冗余。
对于高清激光雷达的高质量数据,我们训练一百帧左右的数据,就可以探测100-120米左右路面的车和物体。另外因为数据点很密,很容易和摄像头做像素级的融合。这样的结合知道这个车的尾灯在什么地方,可以实时跟着尾灯像素,就知道这个车要不要刹车。
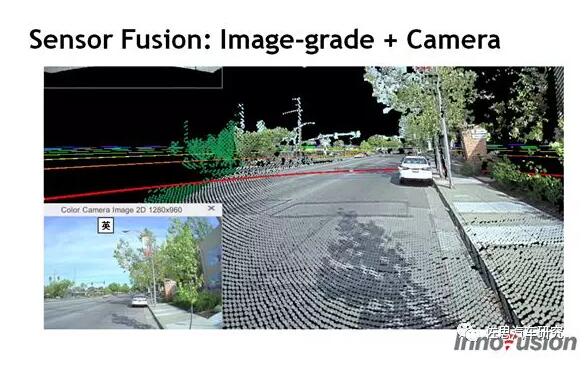
Innovusion的激光雷达很容易和摄像头做传感器的融合。如果有了图像级的激光雷达,自动驾驶就会有跨越式的发展。


