

要说近年汽车行业的大热点,那一定要数自动驾驶技术的开发及应用。无数的主机厂供应商甚至不少初创企业都对这块蛋糕虎视眈眈,对于这项技术,老牌车企如大众丰田似乎还比较保守,只是在自家的顶配车型中进行匹配,作为拔高车系形象或是展示技术实力的作用,而自主品牌则已经将其标配到了各级别的车型中。
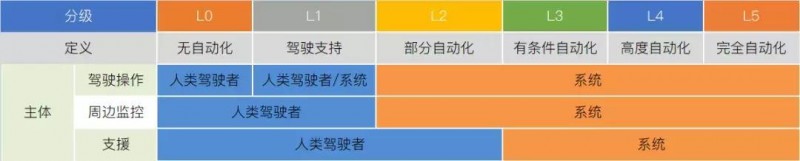
目前,国内装车匹配的多数是LV2级别的辅助智能驾驶,即非复杂工况下的辅助智能驾驶。
主流的LV2级别的辅助智能驾驶功能一般包含AEB自动紧急制动、FCW碰撞预警、ACC自适应巡航、LKA车道保持、LDW车道偏离预警、BSD盲区监测等功能,虽然各个主机厂为了宣传命名不同,但是功能都大同小异。辅助智能驾驶的供应商国内主要为博世、大陆、奥托立夫等,其中博世的市场占有率较高,但是由于辅助智能驾驶涉及动力ECU\TCU标定、转向EPS标定,整个开发过程很考验整车厂的匹配能力,因此即便使用同一家辅助智能驾驶系统供应商,但主机厂匹配能力不同会得出截然不同的结果,所以辅助智能驾驶系统表现的好坏也是车企开发能力的体现。
这次我们选取比较主流的四家自主车企的车型——吉利缤越、传祺GS5、WEY VV7、宝骏RS-5,来对比它们在辅助智能驾驶领域的功能及效果,这四款车型均匹配了1R1V(摄像头+雷达)的硬件方案。供应商方面,传祺GS5、WEY VV7、宝骏RS-5是由博世提供,而缤越采用了奥托立夫作为其供应商,下面我们从最主要的ACC自适应巡航、LKA车道保持两个功能入手来一窥究竟。

ACC自适应巡航功能对比
我们先来聊聊最常用的ACC自适应巡航功能,简单来说这项功能就是车辆纵向的自动控制。以下我们按速度段来评价各家ACC系统表现的优劣。
【0~20km/h速度段】
LV2级别的辅助智能驾驶都具备跟停/跟起功能,即车辆可以跟随前车停车和起步。
在这一速度段的起步,传祺GS5的表现相对更好,得益于AT变速箱液力变矩器的优势,起步过程稳定迅速,低速跟车时速度保持稳定,不存在大幅度上下波动;
吉利缤越和宝骏RS-5表现则中规中矩,缤越的起步速度不如GS5,起步过程会存在一些轻微震动,宝骏RS-5的问题同样在起步上,虽然起步的平顺性不存在问题,但是起步加速较慢,导致跟前车距离会拉开较大一段“引诱”相邻车道车辆加塞进入,而在低速跟随中两车的速度稳定表现都不错,跟GS5不相上下;
在低速段表现稍差的是VV7,起步较迟缓,离合结合过程会偶发性出现比较明显的顿挫感,速度的维持也不太稳定,上下的拨动范围正负3km/h,能感觉到与前车距离忽远忽近。
20 ~0 km/h跟随停车这个项目上,考验的是ESP建压制动的控制,其中吉利缤越、传祺GS5的表现相对优秀,制动力输出线性,跟停的距离也比较符合驾驶员的设想。而WEY VV7与RS-5则相对弱一些,VV7在跟停过程中时有出现制动后又松开而后再次制动的情况,车内乘员感受较为一般,降低了体验;而宝骏RS-5则是在跟停过程中能较为明显听到ESP建立压力工作的哒哒声,相比其余车型比较轻微的噪音逊色一筹。
【20~80km/h速度段】
这一速度段主要是城市快速路和高架使用场景,车况比较复杂,ACC目标车辆无法长期稳定跟随,经常有切入切出的情况,这里考验的是系统对目标的识别情况以及加减速曲线的调整。
这个速度段最佳表现则是属于RS-5,在加速过程中得益于CVT的平顺特性,加速度基本维持在一个定值,不存在换挡等影响。而在低速跟车后前车离开时,RS-5的加速度不是立刻设定为目标值,而是会有一个曲线的递增过程。此外RS-5在减速方面同样出色,前车切入时减速度的发送也非常线性平稳,既不像一个莽撞的新手立刻猛踩刹车,也不像自以为是的老司机很晚才用大力制动避免碰撞。同时这个速度段经常会在行驶中遇到静止等待红灯或避让行人的车辆,此时RS-5对于静止目标的识别准确率惊人,基本不存在不能识别的情况。
其余三台测试车辆则由于有挡位存在,加速时会出现换挡导致加速度的波动,而且在某些特定速度下(正好处于换挡线上下时),还会出现挡位的反复变更导致的顿挫。另外缤越和VV7的加速不知道是由于目标出现丢失还是ECU匹配问题,会经常性出现加速度突然增大而后又恢复正常的现象。
【80~120km/h速度段】
此速度段基本为高速巡航,也是ACC最初出现时使用最频繁的工况,在这个速度段下这四部车的ACC表现都能满足需求,跟车稳定,过弯也不会丢失目标,上下坡对于速度的影响微乎其微,由于基本使用最高挡位或次高挡位,换挡次数和对行驶影响也大大减小。
小结:综合来看,车辆动力系统的硬件因素会对ACC性能表现形成很大的影响,而由于ACC的加速度和减速度相比动力总成或制动系统的绝对能力都相差甚远,所以这里更多要求的是平顺。宝骏RS-5由于占了CVT这一大便宜,综合表现更优秀,而VV7则受其DCT变速箱特性的拖累导致了整体体验相对差一些。
LKA车道保持系统对比
LV2级别另一大关键的辅助智能驾驶系统便是LKA车道保持系统,甚至可以说这项性能的表现决定了车辆整体智能辅助驾控感受的差别。LKA系统主要负责车辆的横向控制,将车辆在直线或是弯道中保持在车道中间行驶,而弯道曲率不同、入弯速度不同、甚至路面的倾斜状况、破损情况都会影响到LKA在弯道表现,所以LKA的调试要比ACC复杂许多。
TIPS:LKA过弯的力度一般是由两部分组成,前馈与反馈,前馈是指摄像头通过识别弯道曲率计算得出的过弯所需的力,反馈则是根据偏离量计算得出的力,两个力相加形成了系统最终的力值。反馈力的计算则是通过比例、积分、微分计算得到的,并不是一个简单的比例关系。
不同的调试者会使用不同的前馈、反馈的比例,那么我们接下来就一一介绍(VV7测试车辆由于四轮定位问题未进行评价)。
【传祺GS5】
此车LKA的调试风格以反馈为主,前馈力占比较低、反馈占比较大,这种调试的风格保证了车辆过弯的能力。因为前馈的计算并没有包含地形、风向等因素,所以一般不能完全保证过弯,而较高的反馈配比可以时时修正,不过这也导致了另外一个问题,过弯时候修正很多,不是非常稳定线性,感觉是一个还未完全掌握技巧的新手在不断地调整方向。同时由于反馈力较大,在入弯和出弯的过程中轨迹常常出现与中心线较大的偏差,因此偶尔有打方向较猛的情况。
综上,传祺GS5的LKA系统比较适合的工况是需要频繁修正轨迹的城市高速环道,由于高速环道的建设受地形限制,弯道经常是变曲率半径弯,需要频繁修正方向适应道路,GS5的修正过程力道充足,能保证车辆不会再弯道偏离中心,维持轨迹的稳定。
【吉利缤越】
吉利缤越和传祺GS5则是完全不同的方向,缤越的方向盘上明显有一个很持续的力,这是LKA系统前馈较高的特征,带给驾驶者的感受就是,入弯、出弯力很持续,不容易出现突兀的猛打方向。当然这种设定也有弊端,车辆的轨迹控制就会变得更为艰难,弯道中会出现蛇形走位。而缤越比较适应的路况是高速公路——高速修建比较规整,弯道的曲率稳定,前馈提供的力度就比较精准,过弯中偏差非常小,基本不需要反馈修正。
【宝骏RS-5】
宝骏则是吸取了前辈的经验,走了比较折中的路线——前馈、反馈配比比较适中,入弯、出弯没有明显的突兀发力的感觉,力道比较持续,弯道中的轨迹控制表现也是很优秀的。不过我在试驾中发现宝骏RS-5的LKA系统抗干扰的能力稍弱,如果在弯道中有比较明显的起伏路或大坑冲击,过弯的感受就会明显下降,车辆在受到冲击之后轨迹偏离得比较明显,导致LKA修正就明显增大——而这虽然是EPS调试导致的,但是对LKA系统的影响较大。
总结:我个人对于LKA系统的理解仍然将其视为辅助驾驶,而在系统运行过程不能让驾驶者产生担忧,目前对于LV2的LKA系统要求,我认为应该着重放在高速工况上,城市使用LKA系统的还是非常稀少。所以从这个角度来说我更喜欢吉利缤越和宝骏RS-5的表现,虽然这两台车的LKA都有各自的缺点,但是它们大部分时候的表现更像一个老司机在替你驾驶,而且高速的表现更平顺稳定;传祺GS5虽然在过弯能力上更胜一筹,但是并不能让我放心的把驾驶权交给它。
总结:
LV2的辅助智能驾驶能让人有种触摸未来的感觉,当车辆自己跟随行驶、自动转向,会带来未来已至的快感,但是你也能明显感觉到其目前的局限——在某些工况下的表现还是不能达到预期。
我个人更喜欢那些以用户体验为基础调试出来的辅助智能驾驶系统,而其中,吉利和宝骏的表现更让我刮目相看。



