

百度资深架构师孔旗通过障碍物感知、障碍物行为预测、路径的决策规划算法与框架等内容分享,详解了 Apollo 如何实现自动驾驶及跟车方案。
障碍物感知系统的实现过程
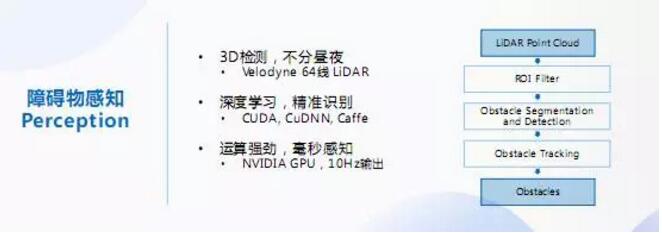
如果一辆车子要实现自动驾驶,那么障碍物感知绝对是最基础也是最核心的功能。Apollo 障碍物感知系统分为 3D 检测、ROI 滤波、识别、运算、感知五大板块。其感知过程如下:首先 LiDAR 探测到信号,传递给 ROI 的 Filter,滤波后的信号通过 Obstacle Segmentation 和 Detection 做识别,然后是 Tracking,Apollo 在运算这一块采用的是 NVIDIA GPU,运算能力强劲,可以实现 10Hz 的输出,最后是 Obstacles 感知。
当系统感知到障碍物后,需要对障碍物进行行为预测,如障碍物是否是动态的,其下一步动作是什么。Apollo 障碍物行为预测系统采用 MLP 多层感知机制,通过深度神经网络与规划算法,达到精准预测路径的目的。
决策规划设计方案与思路
在介绍了障碍物感知与行为预测分析之后,孔旗详细讲解了 Apollo 的决策规划设计方案与思路。如下图为 Apollo 自动驾驶平台的决策规划整体架构,其中,SL MAP 是路径的坐标系,frame 代表数据帧,Decider 则是决策部分,如决定车辆是否换道,在确认换道的情况下,Path Decision 和 Speed Decision 通过计算给出换道方向和速度等信息,底部蓝色是对换道路径的整体规划,架构图右侧绿色框图是交规的处理部分,Objects 代表路权,判断人让车还是车让人就是在这一部分执行处理。
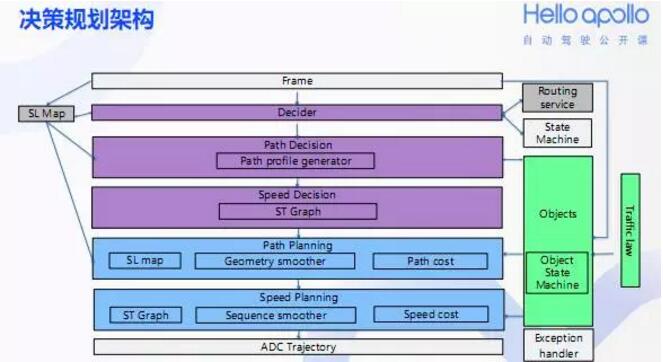
整个决策规划系统里面,最核心部分的是对路径和速度的采样以及优化。Apollo 1.5 跟车方案首先从人的开车规划过程开始分析,如走什么样的路线,用什么样的速度开车,通过 DP 路径算法、QP 路径算法、DP 速度算法、QP 速度算法分析,在做决策的同时进行路径和速度规划,其 EM 规划过程如下图,包括路径 DP 采样、速度 DP 采样、路径 QP 优化与速度 QP 优化四个部分,其中,前二者用来帮助车辆进行行为决策。



