

瑞萨电子全球ADAS中心副总裁Jean-Francois Chouteau表示:“瑞萨电子与DiboTIcs技术的无缝结合,以最高级别的汽车功能安全水准,为先进的LiDAR数据处理实现了实时、高效的解决方案。面向自动驾驶,瑞萨电子正通过与创新型伙伴的合作,优化瑞萨电子端到端平台Renesas autonomy Platform,我们很高兴宣布与DiboTIcs公司合作,为LiDAR市场提供颠覆性的技术。”

Jean-Francois:当下“新车评估计划(New Car Assessment Program,简称NCAP)”不断推动汽车市场发展。该计划是一项政府制定的汽车行车安全计划,旨在针对各种行车安全威胁,评估新车设计的安全性能。OEM都不断精进,力争使其新车获得最高行车安全评级。即将到来的自动驾驶时代也推动形成了新的市场需求,包括感测,传感器融合、决策和控制功能,从而实现几乎无需驾驶员干预的自动驾驶。
Q2.定位需要哪些数据输入?
Jean-Francois:通常,定位需要高清地图、全球定位系统(GPS)、车轮编码器和惯性测量单元(IMU)。采用Dibotics公司的方法,仅基于激光雷达数据,就可完成3D实时定位与制图(SLAM),因此无需安装IMU、车轮编码器或GPS。甚至基准地图也是可选项。
Q3.激光雷达、毫米波雷达、光学摄像头系统未来在智能汽车上的发展前景如何?
Jean-Francois:因为很多汽车制造商都把ADAS和AD看作战略目标,所以包括激光雷达、雷达和摄像头在内的所有ADAS传感器在市场上都有一席之地。最近,由于固态激光雷达的推出使量产激光雷达的价格得以降低,所以激光雷达变得尤其受欢迎。
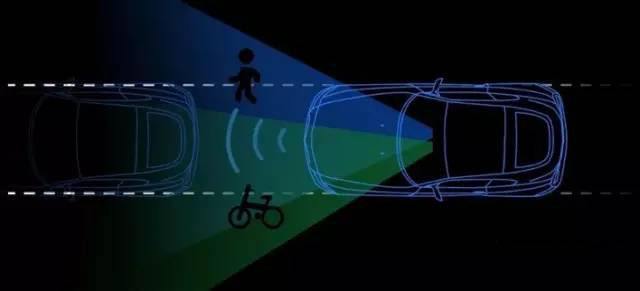
每种传感器(摄像头、雷达、激光雷达)都有强项和弱点:摄像头提供高清和彩色图像,但是缺乏深度信息。雷达探测距离远,在各种天气条件下都很可靠,但是分辨率不够高。激光雷达探测距离中等,提供原生3D数据,其分辨率足以应对物体分类,但在雾雨天运行得不是很好。
Q4.R-Car SoC与Dibotics的3D实时定位和制图技术相结合,会给自动驾驶技术带来哪些改变?
Jean-Francois:R-Car SoC与Dibotics 3D SLAM相结合,可为自动驾驶汽车提供功耗低、功能安全性高的实时3D制图系统。
通过整合瑞萨的高性能图像处理、低功耗汽车R-Car系统级芯片(SoC)和Dibotics的3D实时定位与制图(SLAM)技术,两家公司提供了一种可在SoC中实现3D SLAM处理的SLAM on Chip?,而该功能过去需由一台高性能PC提供。
通过整合R-Car SoC和Dibotics技术,还可提供其他先进功能,例如,无需机器学习,就可进行逐点分类(可行道路、地面、道路标记、交通标志、移动物体、植被等)。
Jean-Francois:整合双方技术的解决方案为先进的激光雷达数据处理提供了一种实时和高能效解决方案。第一步是在我们的平台上嵌入Dibotics软件,下一步将研究能够实现ASIL几级。
Q6.基于R-Car SoC平台,LiDAR数据处理反应速度会有多快?制图成像分辨率如何?
Jean-Francois:这取决于用例和所需分辨率,但是在任何情况下,处理都是在实时和高达40Hz的子帧基础上完成的。
Q7. 未来可能影响智能汽车发展机会的主要挑战在哪里?
Jean-Francois:我们看到,诸如NCAP这类监管法规正在促进车辆前端摄像头等ADAS功能的集成。用户对NCAP规定的行车安全要求的接受度相当高,因为满足这些要求就意味着提供驾驶员辅助系统,例如行人或车辆探测、车道识别等。除非探测到汽车前方有个物体而启动了自动应急刹车系统,否则驾驶员仍然控制着车辆。在SAE国际标准J3016的Level 3(有条件自动化)或Level 4(高度自动化)自动驾驶车辆情况下,用户对自动驾驶而不是自己驾驶的接受度以及规定责任归属的监管法规的出台,将对未来自动驾驶能否成为主流起到重要作用。



