我们将按时间顺序梳理车载芯片的发展历程,探讨未来发展方向。
汽车电子发展初期以分布式ECU架构为主流,芯片与传感器一一对应,随着汽车电子化程度提升,传感器增多、线路复杂度增大,中心化架构DCU、MDC逐步成为了发展趋势;
随着汽车辅助驾驶功能渗透率越来越高,传统CPU算力不足,越来越难以满足处理视频、图片等非结构化数据的需求,而GPU同时处理大量简单计算任务的特性在自动驾驶领域取代CPU成为了主流方案;
从ADAS向自动驾驶进化的过程中,激光雷达点云数据以及大量传感器加入到系统中,需要接受、分析、处理的信号大量且复杂,定制化的ASIC芯片可在相对低水平的能耗下,将车载信息的数据处理速度提升更快,并且性能、能耗和大规模量产成本均显着优于GPU和FPGA,随着自动驾驶的定制化需求提升,定制化ASIC专用芯片将成为主流。
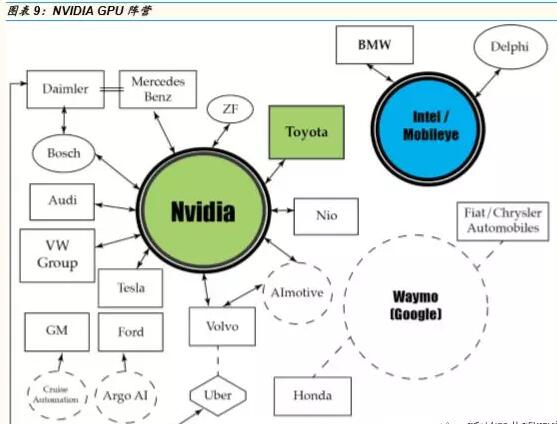
目前出货量最大的驾驶辅助芯片厂商Mobileye、Nvidia形成“双雄争霸”局面,Xilinx则在FPGA的路线上进军,Google、地平线、寒武纪向专用领域AI芯片发力,国内四维图新、全志科技、森国科(国科微)在自动驾驶芯片领域积极布局。
Mobileye的核心优势是 EyeQ 系列芯片,可以处理摄像头、雷达等多种传感器融合产生的大量数据,在L1-L3自动驾驶领域具有极大的话语权,目前出货量超过了2700万颗;
NVIDIA在GPU领域具有绝对的领导地位,芯片算力强大且具备很强的灵活性,但功耗高、成本高,AI机器学习并不太适合GPU的应用;
此外Google、地平线、寒武纪、四维图新等更聚焦在针对不同场景下的具体应用,芯片设计也开始增加硬件的深度学习设计,自动驾驶上AI的应用已经成为未来的趋势。
基于产业前景和潜在的巨大市场,给予行业买入评级,上市公司方面看好四维图新,建议关注地平线、寒武纪。

车载芯片的发展趋势(CPU-GPU-FPGA-ASIC)

2.1 ECU的核心CPU
ECU(Electronic Control Unit)是电子控制单元,其工作过程为CPU接收到各个传感器的信号后转化为数据,并由Program区域的程序对Data区域的数据图表调用来进行数据处理,从而得出具体驱动数据,并通过CPU针脚传送到相关驱动芯片,驱动芯片再通过相应的周边电路产生驱动信号,用来驱动驱动器。即传感器信号——传感器数据——驱动数据——驱动信号这样一个完整工作流程。
2.2 分布式架构向多域控制器发展
汽车电子发展的初期阶段,ECU主要是用于控制发动机工作,只有汽车发动机的排气管(氧传感器)、气缸(爆震传感器)、水温传感器等核心部件才会放置传感器,由于传感器数量较少,为保证传感器-ECU-控制器回路的稳定性, ECU与传感器一一对应的分布式架构是汽车电子的典型模式。
随着汽车电子化的发展,车载传感器数量越来越多,传感器与ECU一一对应使得车辆整体性下降,线路复杂性也急剧增加,此时DCU(域控制器)和MDC(多域控制器)等更强大的中心化架构逐步替代了分布式架构。

人工智能的发展也带动了汽车智能化发展,过去的以CPU为核心的处理器越来越难以满足处理视频、图片等非结构化数据的需求,同时处理器也需要整合雷达、视频等多路数据,这些都对车载处理器的并行计算效率提出更高要求,而GPU同时处理大量简单计算任务的特性在自动驾驶领域取代CPU成为了主流方案。
3.1 GPU Vs. CPU
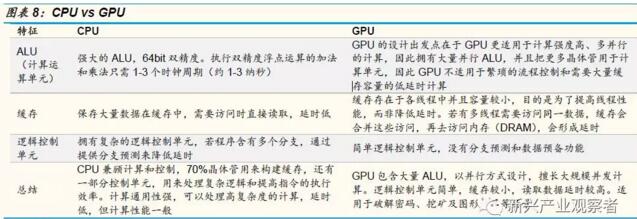
目前无论是尚未商业化生产的自动驾驶AI芯片还是已经可以量产使用的辅助驾驶芯片,由于自动驾驶算法还在快速更新迭代,对云端“训练”部分提出很高要求,既需要大规模的并行计算,又需要大数据的多线程计算,因此以GPU+FPGA解决方案为核心;在终端的“推理”部分,核心需求是大量并行计算,从而以GPU为核心。