

如图1所示,当车辆在弯道行驶时,在距离弯道一定距离之前,需要对车速进行控制使车辆可以安全通过弯道(一般情况下进行减速)。该问题的难点在于如何使车辆从当前的车速在入弯时到达期望车速,既要保证入弯速度快,又要保证消耗能量少,同时较好地兼顾车辆行驶舒适性与安全性。弯道行驶时的安全速度规划问题即从车辆当前位置开始对速度开始进行控制,直到车辆在入弯时达到期望的安全车速,同时保证车辆的横向运动安全性与舒适性。
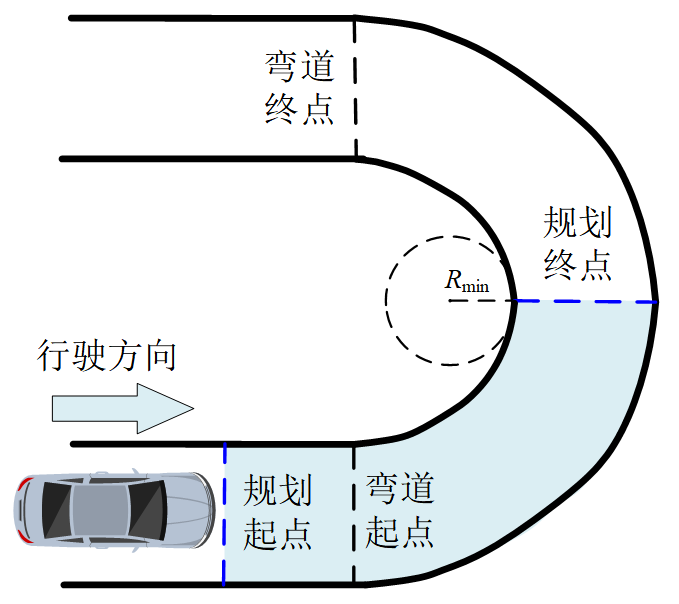
图1 弯道行驶场景
对弯道中的速度规划问题见文末延伸阅读部分,本文就对车辆安全过弯中的速度规划问题进行深入探讨。
一、安全车速
车辆安全车速直接关系着智能车的安全性与乘坐舒适性,因此,在速度规划时必须将车辆安全车速作为一个约束条件进行考虑,比如弯道行驶时需要根据道路曲率限制车辆速度,在车辆入弯之前就平稳减速。安全车速研究的是速度与曲率的关系,通过引入横向加速度和横摆角速度建立安全车速模型,并出于对车辆稳定性和乘坐舒适性等因素的考虑,对横向加速度和横摆角速度施加约束条件,如式(1)所示:
其中,分别为车辆最大横向加速度和最大横摆角速度;ky和为乘坐舒适性系数;µ为车辆横向附着系数;κ为道路曲率,g = 9.8m/s2为重力加速度。为了保证车辆弯道行驶安全性,需要根据动态变化的环境信息对车辆速度进行限制,尤其是基于曲率的车辆自适应动态限速,根据式(1)可得:
由式(2)可知,入弯过程安全车速的计算前提是确定最大横向加速度,根据考虑的因素不同,目前主要有表1所示的六种安全车速模型。
雷诺
1.1.考虑摩擦圆的最大加速度
许多方法考虑车辆稳定性和乘坐舒适性,基于摩擦圆的性质将最大横向加速度表示为。图2描述了轮胎力摩擦圆,在横向侧偏角和纵向滑移力的共同作用下产生的总轮胎力需小于μFz。图2中不同圆弧表示不同的横纵向轮胎力组合,对应不同侧偏角和滑移率水平。对于同一纵向滑移率,纵向力Fx随侧偏角的增加而减小,反之亦然。纵向滑移率sx由0.01增加到0.61时,Fx逐渐变大至饱和,达到道路附着极限,此时的圆弧即为摩擦圆,由横纵向力构成的圆弧需分布在摩擦圆内以保证车辆稳定性。

图2 轮胎力摩擦圆
1.2.基于驾驶特征提取的最大横向加速度
Malcolm的研究表明:人类驾驶员不只按摩擦极限的标准确定安全车速,在车速超过20 km/h时,驾驶员往往会预估高速行驶带来的危险,可接受的横向加速度并非恒定,而是与速度呈反比。基于该结论,Reymond提出横向加速度裕度模型ay = k1-k2v2,系数k1、k2根据实验数据拟合得到。类似的,还有根据不同驾驶场景下的真实行驶数据拟合出的Levison安全模型模型、考虑人类运动通用特征的拟人式驾驶员模型,系数k3、k4、k5均由实验数据拟合得到。Bosetti等考虑低速时横向加速度饱和的情况,对Levison模型加以修正,如表1所示。
以上安全速度模型仅保证当前位置的安全性,当未来道路曲率增长较快时,存在难以按期望减速度将速度减至期望速度的情况,此时当前位置的车速是不合理的,故安全车速模型不能只考虑当前位置的安全性,还需考虑未来减速过程中的安全性,因此基于经验公式建立考虑横纵向加速度协调关系的安全车速模型
式中不同C值代表不同驾驶行为,|C| 越大,纵向加速度ax越大,驾驶行为越激进,故定义C为激进因子。针对任意道路曲率已知的弯道,考虑经验驾驶行为的纵向速度仅取决于C值,故为满足摩擦圆的限制,C的可行域Ω需满足式(3),其上下界分别对应纵横向最大加速度,如图3所示:

图3 不同激进因子C下横纵向加速及摩擦圆
设车辆安全车车速为Vlim,其需要满足:
其中,Vmax为满足交通规则限制的最大车速,,C为根据实车驾驶行为标定的参数。
二、G-planning多项式速度规划方法
定义考虑式(3)安全车速的多项式速度规划方法为G-planning方法,其中,为保证冲击度连续性和求解效率,采用三次多项式建立速度模型,如下式所示:
其中,s、v分别表示速度规划过程中的规划里程和纵向车速。通过计算速度对时间的一阶导、二阶导,分别得到纵向加速度和冲击度的表达式:
其中,上角标表示对里程求导。
车辆舒适、平稳且安全过弯问题可构建为考虑滑行行为、通行时间和安全车速的多目标优化问题,满足车辆在速度规划起点和终点处的状态约束:
及舒适性约束:
根据规划起点和终点的边界条件,可求得安全过弯的参考速度模型为:
由于考虑了经验驾驶行为、摩擦圆约束、高阶非线性舒适性约束、具有不确定性的驾驶特征约束等约束条件,导致度规划问题求解非常复杂。因此,为了兼顾求解效率和全局最优,提出一种基于混沌优化的实时求解算法。求解后的最佳规划距离如图4所示,不同参数值反应了不同水平的舒适性和效率性,进而决定不同的规划距离。图5绘制了不同初速度下的横纵向加速度曲线,可见满足摩擦圆约束。

图4 不同参数下的最佳规划距离

图5 不同初速度下横纵向加速度对比
图6绘制了规划时间与纵向最大加速度曲线,由此可得:G-Planning方法在低入弯速度时,虽然最大纵向加速度更大,但其值仍然很小,此时两种方法的舒适性均较好。在中初速度时最大减速度更小、舒适性更好。高速入弯时,在保证舒适性的前提下,规划时间大幅缩短,通行效率显著提高。G-Planning方法的规划结果体现了有经验的驾驶员低初速度时采用滑行方式入弯、高初速度时不以牺牲通行效率来追求绝对舒适性的驾驶习惯,更好地平衡了乘坐舒适性与通行效率。

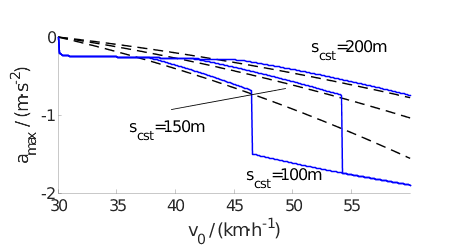
图6 规划时间与纵向最大加速度对比
三、基于多项式的进出弯速度快速规划方法
针对如图1所示的弯道行驶场景,假设车辆依次通过了两个弯道1和2,并假设车辆行驶的纵向速度与行驶里程之间的关系如图7所示,减速通过弯道后又加速至目标车速,可将该复杂的弯道驾驶行为描述为一个安全车速优化求解问题。
图7 安全车速求解问题描述
定义车辆纵向运动为三阶动力学系统:
其中,分别为车辆纵向行驶里程、车速、加速度和冲击度。
车辆平稳与安全过弯问题即求解如下优化问题以寻找最优的冲击度输入和行驶时间:
同时,满足边界约束:
以及安全速度约束:
其中,多目标优化问题(10)中包含两个优化目标:快速通行即行驶时间T最短,平稳过弯即舒适性(或冲击度)最小,wT表示两个目标间的权重系数。则车辆过弯的安全车速规划问题可描述为如下优化问题:
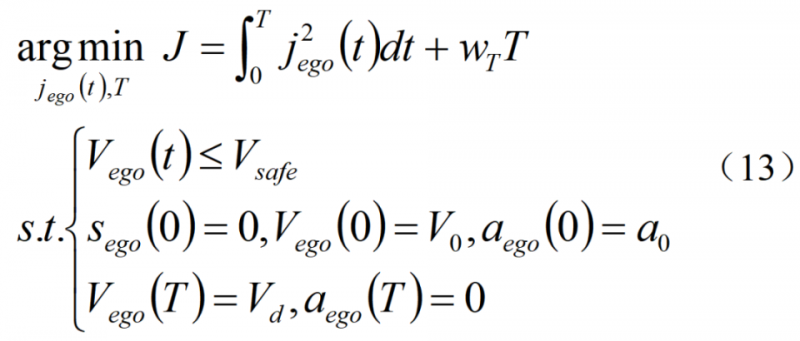
考虑到该问题的复杂性,同时规划减速入弯与加速出弯两个过程中的安全车速难度较大,因此,将这两个阶段的规划问题独立成两个子问题依次求解。
3.1 减速入弯过程
减速入弯过程实质上就是点到点的速度规划问题,比如图7中的A-C或者A-B,该局部优化问题相对全局规划问题(13)更容易求解。由于C点处的曲率更大,其安全车速更低,故以A-C作为研究对象。则在C点处的边界条件为:
其中,到达C点的时间TC未知,C点处的安全车速为Vc。
根据起点A和急弯C点处的边界条件,假设车辆行驶里程可用5次多项式来描述,即
则求导可得速度、加速度和冲击度为

其中,系数ci可由边界条件求得,即
车辆需满足舒适性、安全性约束条件
其中,分别为车辆安全极限车速、最大加速度及最大冲击度。化简可得TC的取值范围为,在该可行域内的规划模型(13)等价于
显然,该规划模型(19)是一个带约束的单变量非线性优化模型,其优化变量是,根据KKT原理,其最优解将出现在极值点或边界点处。假设极值点为TC0,则通过比较极值点和边界点的代价函数值大小即可实现该规划模型的求解。考虑其极值点满足条件
求导后可得
则通过求最小的代价函数值
即可求得最优的到达时间,进而规划出最优的入弯速度。
3.2 加速出弯过程
加速出弯过程实质上是自由加速问题,图7中C-D过程中的局部优化问题相对全局规划问题(13)也将更容易求解。以C-D过程作为研究对象,起点C点的时间记为0,在C和D点处的边界条件为:
其中,由C点出发到达D点的时间TD未知,则整个平稳过弯过程的时间为T=TC+TD。
与入弯过程相类似,假设车辆行驶里程可用5次多项式来描述,即
其中,系数ci可由边界条件求得,即
性能约束条件与(18)相同,将其化简后得:
加速出弯过程的规划模型(13)等价于
其极值点满足条件
可得极值点为
根据导数函数(28)的特点,当时,最优的到达时间为;当时,则最优的到达时间为,进而规划出最优的出弯速度。
综上,通过求解最优的到达时间和,进而规划出整个平稳过弯过程的速度,则过弯时间即由A到D的总行驶时间为。



