开车不用踏油门、跟前车过近会自动减速……这些看上去就像自动驾驶一样的“神技”,都是ACC自适应巡航系统可以做到的,有没有觉得很高大上?
实际上,这只是ADAS智能驾驶辅助系统中最为基础的一个功能,本篇文章带你解深入析。
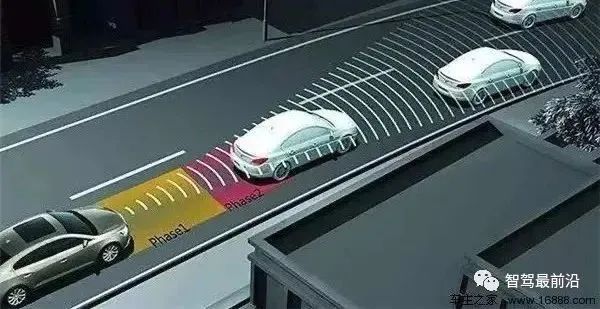
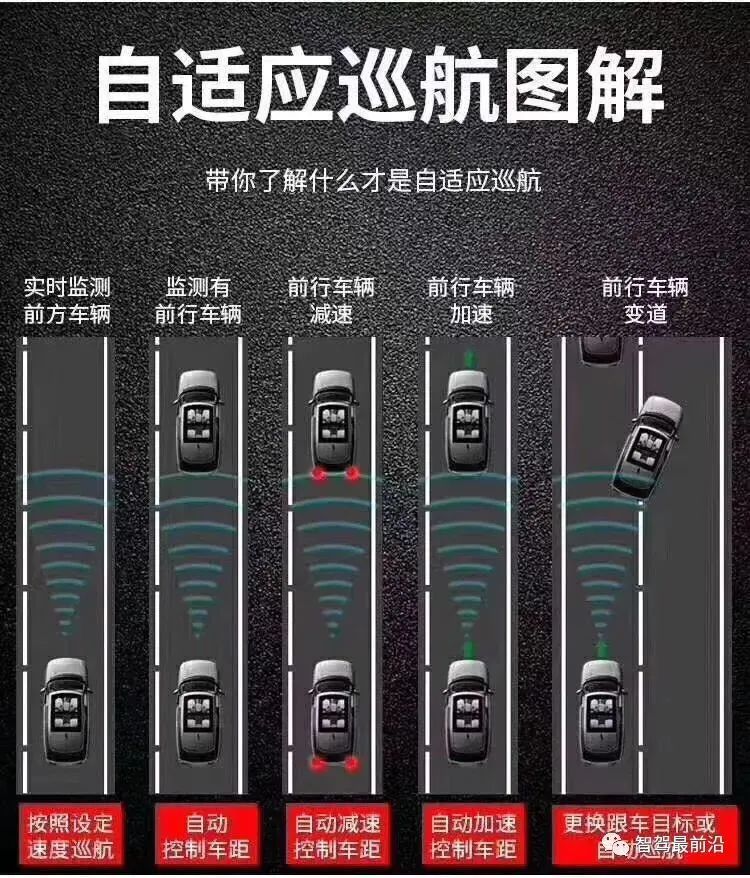
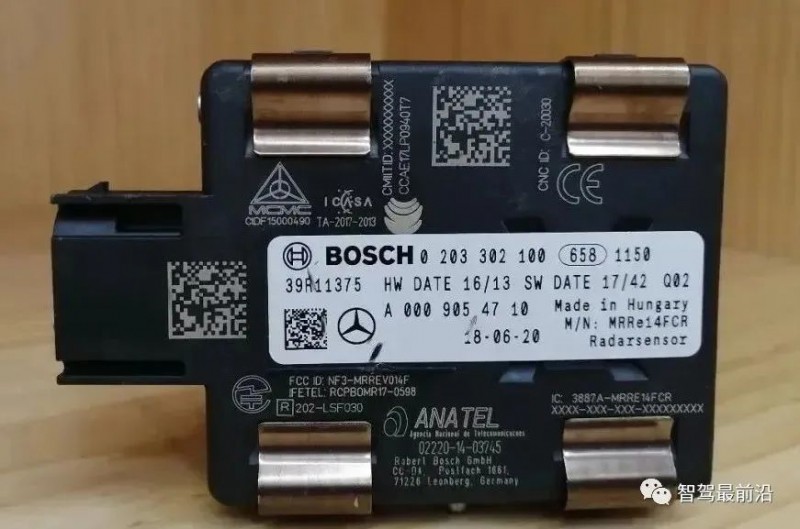
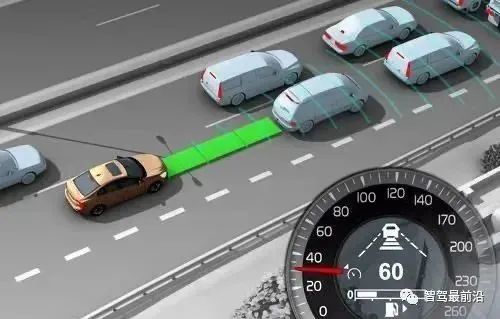
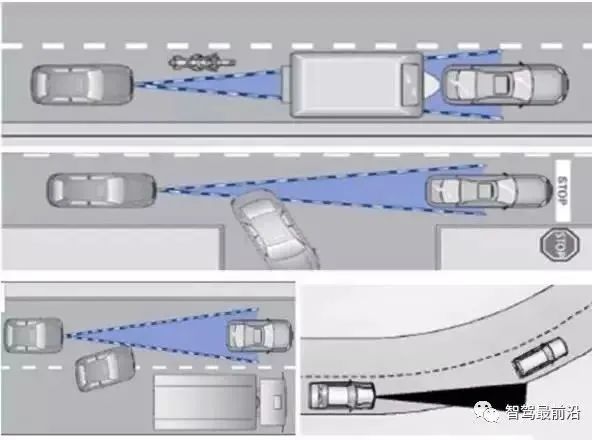
自适应巡航(ACC)的历史 自适应巡航系统的历史可以追溯至上个世纪70年代。1971年,美国EATON(伊顿)公司便已从事这方面的开发。其雏形是日本三菱公司提出的PDC(Preview Distance Control)系统,它将雷达与其他处理器结合在一起,可以侦测出车距变化,并对驾驶员发出警告,系统还可以控制节气门开度调节发动机功率。此后丰田、本田、通用、福特、戴姆勒、博世等公司也投入到了研发行列。 1995年,三菱汽车首先在旗下提供一种叫做“预见式距离控制”系统。那是一种基于激光测距的ACC系统,但整套系统只通过油门和档位进行控制,并不进行刹车。基于激光的系统明显比雷达为基础的系统成本低,但基于激光在恶劣天气条件下会受到很大影响。因此目前基本使用基于雷达的ACC系统。 1997年8月,丰田开始在雷克萨斯上使用“雷达巡航控制系统”,并且在2000年加入刹车功能,2004年加入“低速跟踪模式”。低速跟踪模式属于一种额外的模式,需要驾驶员启动,如果前车出现制动或者停下,该模式也可以让车辆减速乃至停车,不过这套系统很快就被停用,估计是存在一定的设计漏洞,并不完善所致。 1998年底,奔驰在旗下S系车型中引入Distronic距离控制系统,跟我们现在理解的自适应巡航没有太大的差别。2006年,奔驰进一步完善了该系统,在必要的情况下能够将车辆完全停止,因此又称为增强型限距控制系统(DISTRonIC PLUS)。这个功能有点像现在沃尔沃倡导的全力制动系统:在必要的时候全力刹车,直至车辆挺住。而奥迪在国外普遍使用博世提供的自适应系统。包括A4、A6、A8和Q7都有配备。 在2006年,雷克萨斯将新一代ACC系统装备在其旗舰车型LS460上。这套系统可以在0-100公里时速范围内工作,并且可以反复启停,即使高速公路拥堵也可以应付。 2010年,奥迪在A8上搭载了全球第一款具备GPS功能ACC系统。 2015年,随着特斯拉ModelS的推出,ACC系统开始作为半自动驾驶进入普通大众的视线。 自适应巡航(ACC)功能解析 1.定速巡航功能:前方无车辆时,按驾驶员设定的巡航车速稳定行驶。 2.跟车巡航功能:前方有目标车辆时,根据前车状态跟车巡航。 前方车辆减速,本车会自动减速保持安全距离。 前方车辆加速,本车会自动加速回到巡航速度。 安全巡航距离可以根据不同路况做相对调整。 自适应巡航(ACC) 原理 在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。 通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态。 通过反馈式加速踏板感知的驾驶者施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶者的疲劳。 自适应巡航(ACC)的弊端 不过,咱么不能之说ACC的好话,他还是存在一些不优秀的地方~ 1、每人驾驶习惯不同,ACC在高速使用时,由于境况不同,敏感程度也会不同,在雷达沾惹污物时可能会影响行车安全,在加速减速时,可能会产生有不适感,在瞬时油耗会加大; 2、当你快速行驶超越旁边车道车辆时,假如前方车辆突然变道,自适应巡航可能反应不及而撞上去; 3、自适应巡航系统实际操作相对复杂,学习成本高,容易让驾驶者降低警惕,脚不在踏板位置会加长反应时间。 4、由于ACC雷达一般都是中距雷达,检测区域是有限的,再加上雷达相对位置固定,检测角度和方向相对不变,因此,某些情况下,对于前方车辆的检测存在盲区,ACC无法有效识别目标,存在碰撞的风险,而在有些情况下,ACC则存在误识别,造成不必要的减速。 ACC无法有效识别目标,存在追尾的风险 ACC作为高级驾驶辅助系统(ADAS)的一种,是将来自动驾驶功能的过渡配置之一。有许多人都对ACC有一种笼统的认识:ACC就是自动巡航,可以自动加减速。从官方的各种宣传来看,我们也只看到ACC给人们驾驶带来的便利,但是,ACC并不能保证在所有的道路情况下都有效,您仍然要负责保持合适的车距和车速,并在可能发生危险时进行干预。作为最终的使用者,首先要清楚ACC在哪些情况下会失效或性能下降,这样才能安全地去享受到ACC功能带来的便利。